CoreXY printers have two timing belts overlaid on each other around the box. To allow the belts to move, bearings are placed in various corners. Today, I’ll tackle the back top corners of the printer box.
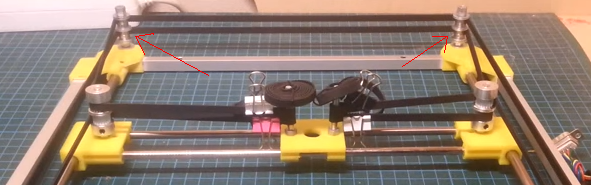
In the image below (taken from a scene of this video), you can see how it’s handled usually:

image showing back corners of CoreXY belt system
Because I’m trying to avoid using any rods are other forms of complex structure, I decided to come up with a printed solution that I could attach to the wooden corners of the box.
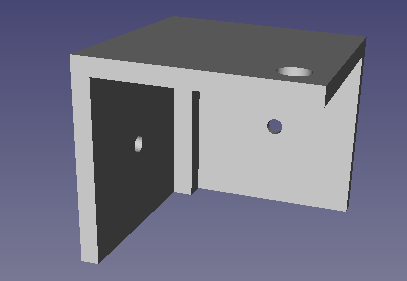
The design with bearings and a washer in place will look like this:

back top corners of print, with two bearings and a washer in place
This slots neatly over the wood at the back top corners of the box.
The design is not yet perfect. I anticipate there will be pressure towards the center of the box on the bottom bearing, so I should have screw holes at the bottom of those walls as well. But, I think this will do for the “bootstrap” printer.
An improvement I will be making as soon as the prototype is complete, is to replace the metal bearings with 3d-printed bearings, like in this video. That will get me closer to having a purely 3d-printed 3d printer. Also, 3d-printed bearings will be cheaper than metal bearings, reducing the cost for future printers.
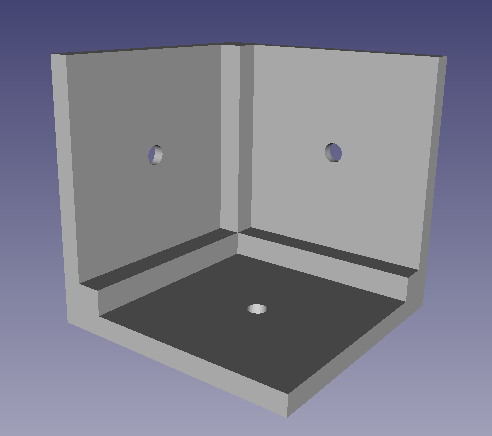
So to create the corners, we will need to print out two each of the outer back top corners, and the inner back top corners. Don’t slot them together until you have your bearings. Otherwise you will find it difficult (or impossible) to separate them without breaking them.

inner back top corner. bearings and washer go on the pole

outer back top corner. the hole on the top slots onto the inner corner’s pole to keep it still
Once your pieces are printed, place an LM8UU bearing on each pole, then a washer, and then another LM8UU bearing. Slot the bottom piece with the pole into the top piece so that the pole goes into its corresponding circular hole in the top piece. You might need to shave the top of the pole slightly to make this fit. Don’t shave too much.
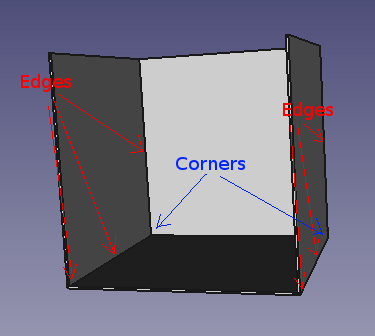
Finally, place the corner pieces over the back top corners of the box and bolt them in place. For the other edge and corner pieces so far, you could use screws, but this one will need bolts because there will be inward pulling force on the pieces from the belts going through them.

where to put the inner back top corner pieces
I don’t yet have the bearings for the corners, so the photo below is of installation on one side without the bearings. When the bearings arrive, I’ll update this post.

back top corner. the belts loop around the pole on this (after bearings are added)